
One of the goals of this work is to complement the simulation tools already created to contemplate the study of negative obstacles and inverted road curbs.
Simulation tools are very important to visualize and understand the problem before field analysis and test different algorithms.
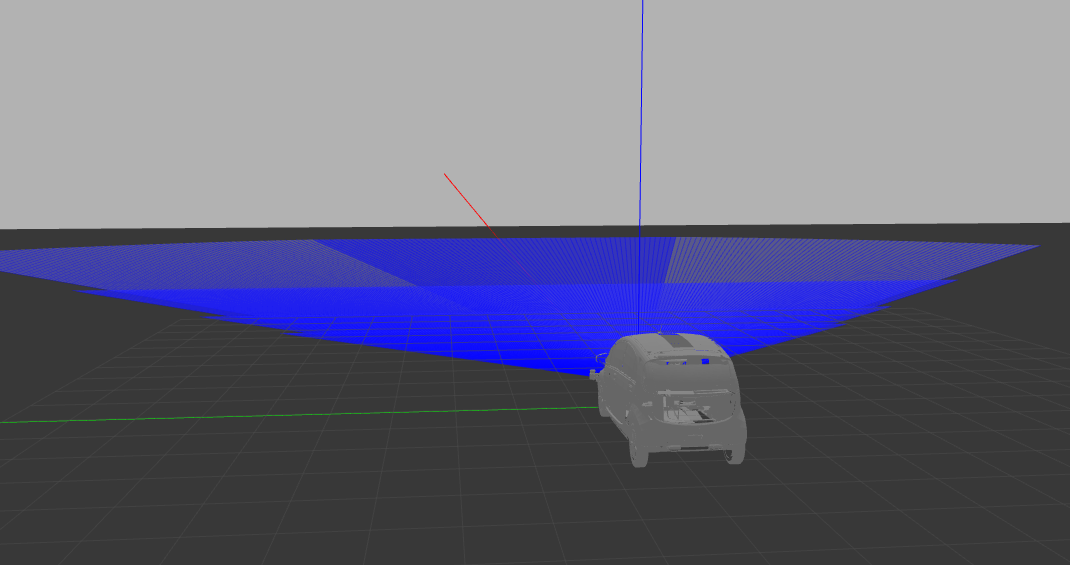
In the line of this work there are two simulators in progress: a Matlab simulator that is based of mathematical equations to simulate laser beams and its intersections with a defined plane, and a Gazebo simulator that has a 3D model of the AtlasCar2 and has features that allows the definition of different types of LIDAR and also 3D models to simulate different types of roads. The last one is implemented in ROS and has the ultimate goal of simulating the movement of the car along the road and create a point cloud as if the real world car was actually moving.

Both this tools are still in progress with the final goal of simulating different types of situations in different road conditions.


